International Conference on Intelligent Robots and Systems (IROS), 2020.
Abstract
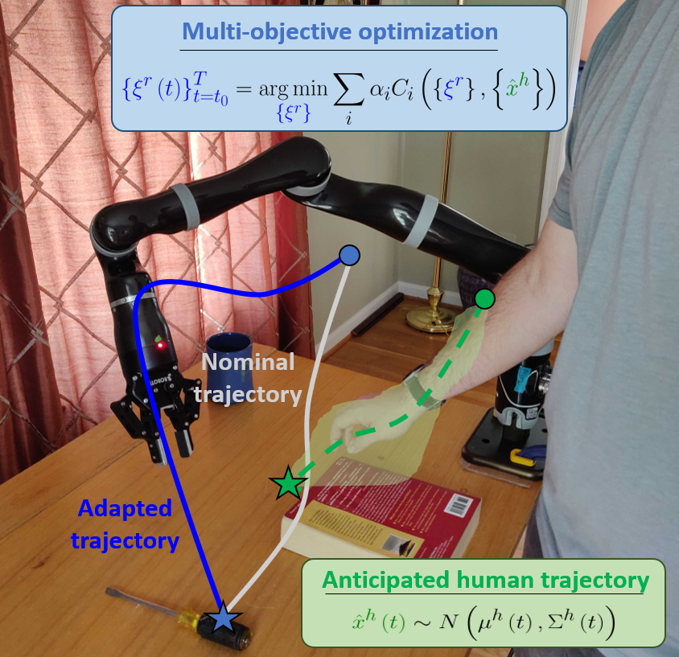
We address the problem of adapting robot trajectories to improve safety, comfort, and efficiency in human-robot collaborative tasks. To this end, we propose CoMOTO, a trajectory optimization framework that utilizes stochastic motion prediction models to anticipate the human’s motion and adapt the robot’s joint trajectory accordingly. We design a multi-objective cost function that simultaneously optimizes for i) separation distance, ii) visibility of the end-effector, iii) legibility, iv) efficiency, and v) smoothness. We evaluate CoMOTO against three existing methods for robot trajectory generation when in close proximity to humans. Our experimental results indicate that our approach consistently outperforms existing methods over a combined set of safety, comfort, and efficiency metrics.