(* equal contribution)
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2023.
Abstract
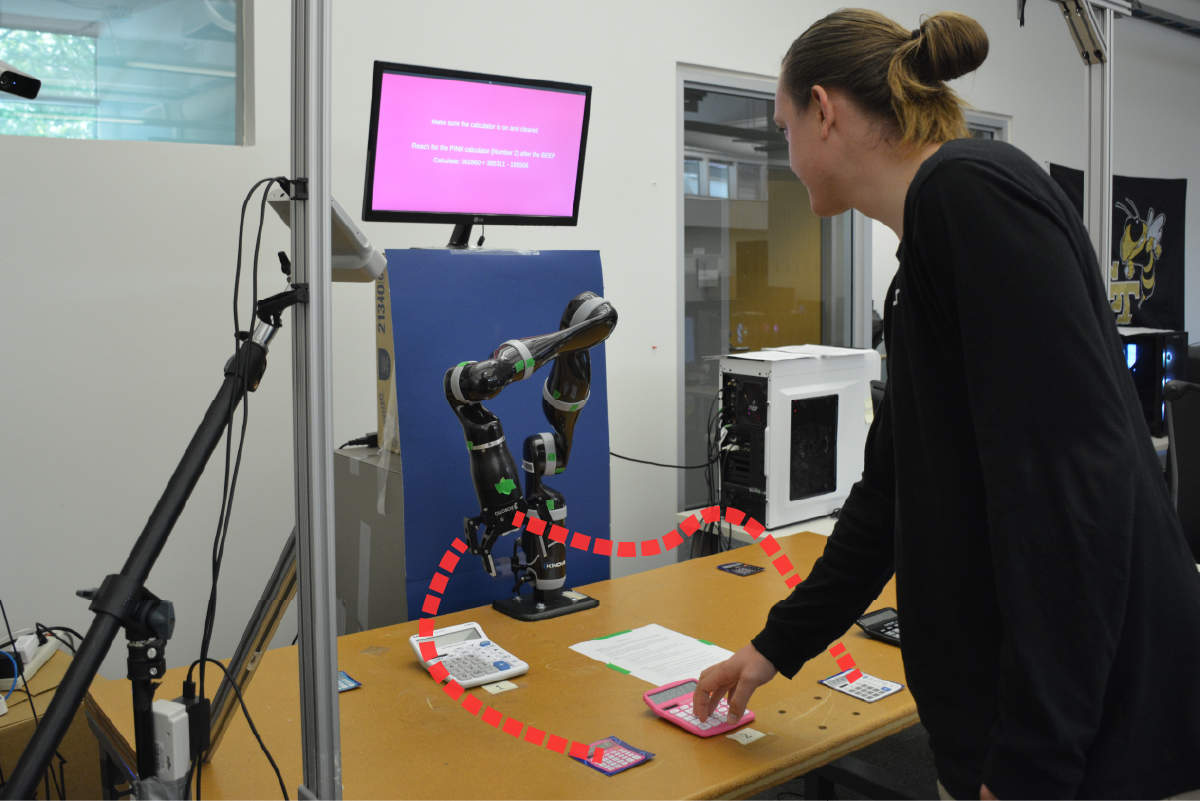
Close-proximity human-robot interactions can be improved through the optimization of task-centric factors or by prioritizing the user experience. Prior work has often explored these factors individually. In this paper, we conducted a within-subject study with 18 participants that compared a multi-objective robot motion adaptation method (CoMOTO) against methods that optimize distance from the user (UserAvoidant) or task performance (ShortestPath) in a close-proximity human-robot interaction task. In the task, the robot and participants worked on different tasks in an overlapping workspace. We show that while CoMOTO trajectories took longer time, they caused significantly fewer interruptions compared to ShortestPath and generated shorter trajectories than UserAvoidant. CoMOTO was also perceived as significantly more intelligent, more trustworthy, and preferred by an overwhelming majority of the participants.